|
| void | SetUp () override |
| |
| void | TearDown () override |
| |
| std::chrono::duration< double, std::milli > | run_nodes (const custom_interfaces::msg::ConeArray &track_msg, const custom_interfaces::msg::Pose &state_msg) |
| |
Definition at line 6 of file integration_tests.cpp.
◆ run_nodes()
| std::chrono::duration< double, std::milli > IntegrationTest::run_nodes |
( |
const custom_interfaces::msg::ConeArray & |
track_msg, |
|
|
const custom_interfaces::msg::Pose & |
state_msg |
|
) |
| |
|
inlineprotected |
◆ SetUp()
| void IntegrationTest::SetUp |
( |
| ) |
|
|
inlineoverrideprotected |
◆ TearDown()
| void IntegrationTest::TearDown |
( |
| ) |
|
|
inlineoverrideprotected |
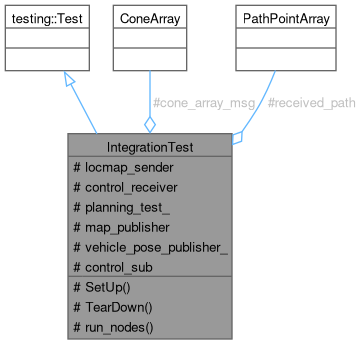
◆ cone_array_msg
| custom_interfaces::msg::ConeArray IntegrationTest::cone_array_msg |
|
protected |
◆ control_receiver
| std::shared_ptr<rclcpp::Node> IntegrationTest::control_receiver |
|
protected |
◆ control_sub
| std::shared_ptr<rclcpp::Subscription<custom_interfaces::msg::PathPointArray> > IntegrationTest::control_sub |
|
protected |
◆ locmap_sender
| std::shared_ptr<rclcpp::Node> IntegrationTest::locmap_sender |
|
protected |
◆ map_publisher
| std::shared_ptr<rclcpp::Publisher<custom_interfaces::msg::ConeArray> > IntegrationTest::map_publisher |
|
protected |
◆ planning_test_
| std::shared_ptr<Planning> IntegrationTest::planning_test_ |
|
protected |
◆ received_path
| custom_interfaces::msg::PathPointArray IntegrationTest::received_path |
|
protected |
◆ vehicle_pose_publisher_
| std::shared_ptr<rclcpp::Publisher<custom_interfaces::msg::Pose> > IntegrationTest::vehicle_pose_publisher_ |
|
protected |
The documentation for this class was generated from the following file: