Loading...
Searching...
No Matches
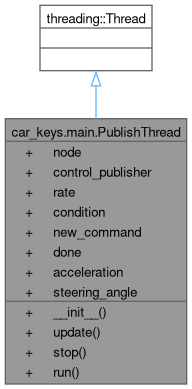
car_keys.main.PublishThread Class Reference
Thread to publish control commands to the robot. More...
Inheritance diagram for car_keys.main.PublishThread:
Collaboration diagram for car_keys.main.PublishThread:

Public Member Functions | |
| __init__ (self, rate) | |
| Constructor for the PublishThread class. | |
| update (self, float acceleration, float steering_angle) | |
| Update the control commands to be published. | |
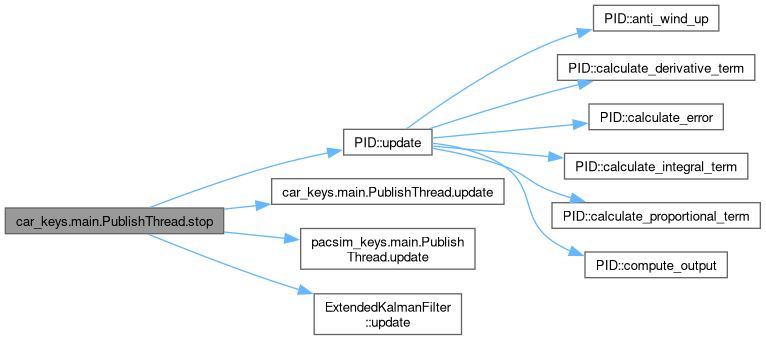
| stop (self) | |
| Stop the thread. | |
| run (self) | |
| Run the thread to publish control commands. | |
Public Attributes | |
| node | |
| control_publisher | |
| rate | |
| condition | |
| new_command | |
| done | |
| acceleration | |
| steering_angle | |
Detailed Description
Constructor & Destructor Documentation
◆ __init__()
| car_keys.main.PublishThread.__init__ | ( | self, | |
| rate | |||
| ) |
Member Function Documentation
◆ run()
| car_keys.main.PublishThread.run | ( | self | ) |
◆ stop()
| car_keys.main.PublishThread.stop | ( | self | ) |
◆ update()
| car_keys.main.PublishThread.update | ( | self, | |
| float | acceleration, | ||
| float | steering_angle | ||
| ) |

Member Data Documentation
◆ acceleration
◆ condition
◆ control_publisher
◆ done
◆ new_command
◆ node
◆ rate
◆ steering_angle
The documentation for this class was generated from the following file:
- src/car_keys/car_keys/main.py