Loading...
Searching...
No Matches
MockerNode Class Reference
#include <mocker_node.hpp>
Inheritance diagram for MockerNode:
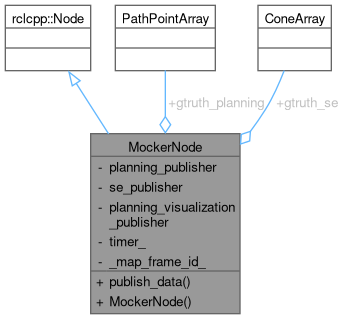
Collaboration diagram for MockerNode:
Public Member Functions | |
| void | publish_data () |
| publish the messages | |
| MockerNode () | |
| Constructor for a new Mocker Node object. | |
Public Attributes | |
| custom_interfaces::msg::PathPointArray | gtruth_planning |
| custom_interfaces::msg::ConeArray | gtruth_se |
Private Attributes | |
| rclcpp::Publisher< custom_interfaces::msg::PathPointArray >::SharedPtr | planning_publisher |
| rclcpp::Publisher< custom_interfaces::msg::ConeArray >::SharedPtr | se_publisher |
| rclcpp::Publisher< visualization_msgs::msg::Marker >::SharedPtr | planning_visualization_publisher |
| Timer for the periodic publishing. | |
| rclcpp::TimerBase::SharedPtr | timer_ |
| std::string | _map_frame_id_ |
Detailed Description
Definition at line 17 of file mocker_node.hpp.
Constructor & Destructor Documentation
◆ MockerNode()
| MockerNode::MockerNode | ( | ) |
Constructor for a new Mocker Node object.
- Parameters
-
track_name desired mock track_name file / folder sim desired simulator that contains a track
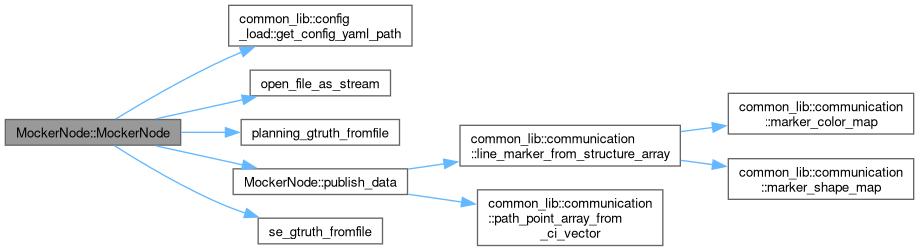
Definition at line 9 of file mocker_node.cpp.
Here is the call graph for this function:
Member Function Documentation
◆ publish_data()
| void MockerNode::publish_data | ( | ) |
publish the messages
Definition at line 42 of file mocker_node.cpp.
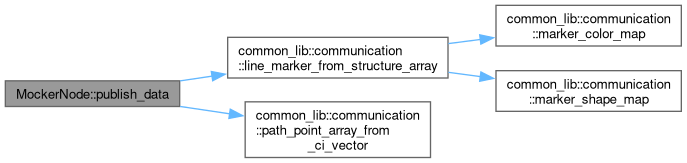
Here is the call graph for this function:
Here is the caller graph for this function:

Member Data Documentation
◆ _map_frame_id_
|
private |
Definition at line 26 of file mocker_node.hpp.
◆ gtruth_planning
| custom_interfaces::msg::PathPointArray MockerNode::gtruth_planning |
Definition at line 29 of file mocker_node.hpp.
◆ gtruth_se
| custom_interfaces::msg::ConeArray MockerNode::gtruth_se |
Definition at line 30 of file mocker_node.hpp.
◆ planning_publisher
|
private |
Definition at line 19 of file mocker_node.hpp.
◆ planning_visualization_publisher
|
private |
Timer for the periodic publishing.
Definition at line 21 of file mocker_node.hpp.
◆ se_publisher
|
private |
Definition at line 20 of file mocker_node.hpp.
◆ timer_
|
private |
Definition at line 24 of file mocker_node.hpp.
The documentation for this class was generated from the following files:
- src/mocker_node/include/node/mocker_node.hpp
- src/mocker_node/src/node/mocker_node.cpp